Architecture Evolution
Throughout the development of MosqueterOS, we designed and iterated through three distinct architectural versions. Each version represents an evolution in our understanding of the system requirements, addressing limitations discovered during testing and adding new capabilities based on project goals.
This page documents the progression from our initial prototype to the final, optimized architecture that powers our robot today.
🔹 Version 1: Initial Prototype
Testing & Learning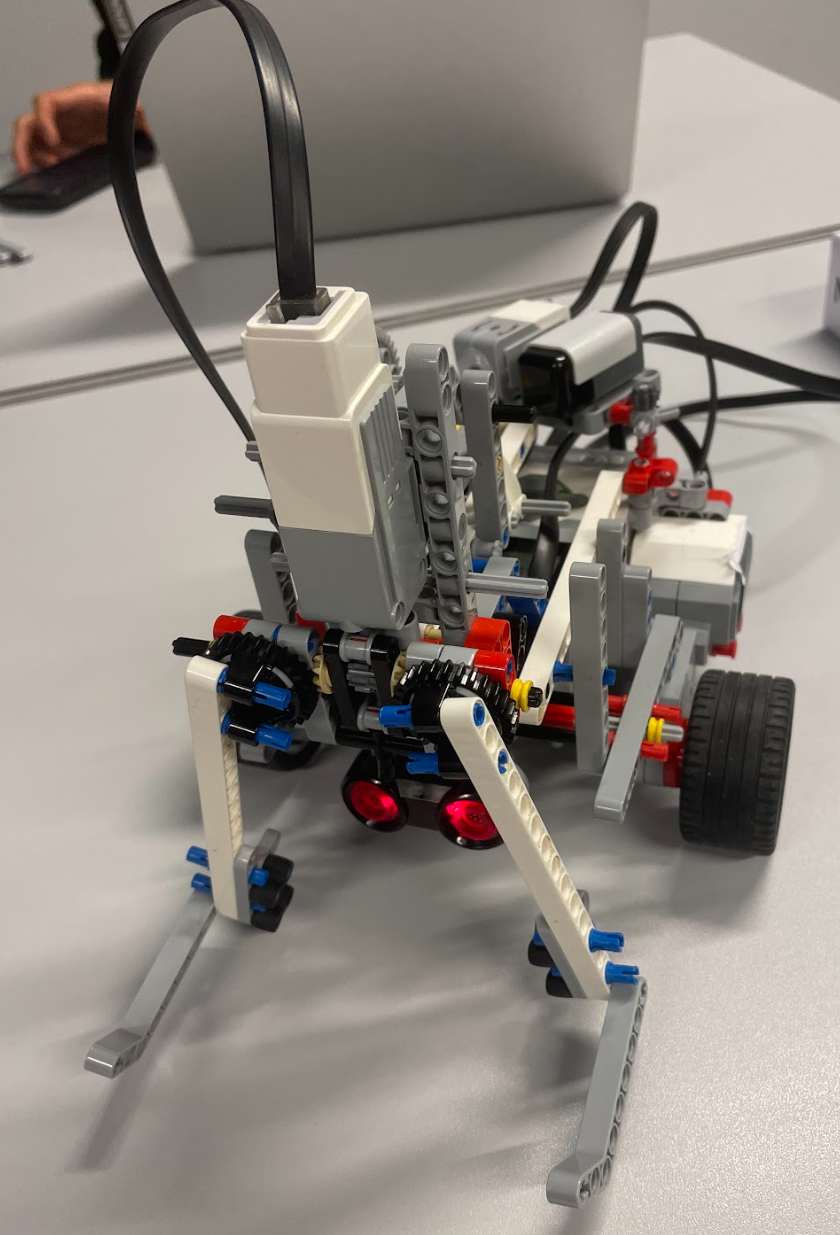
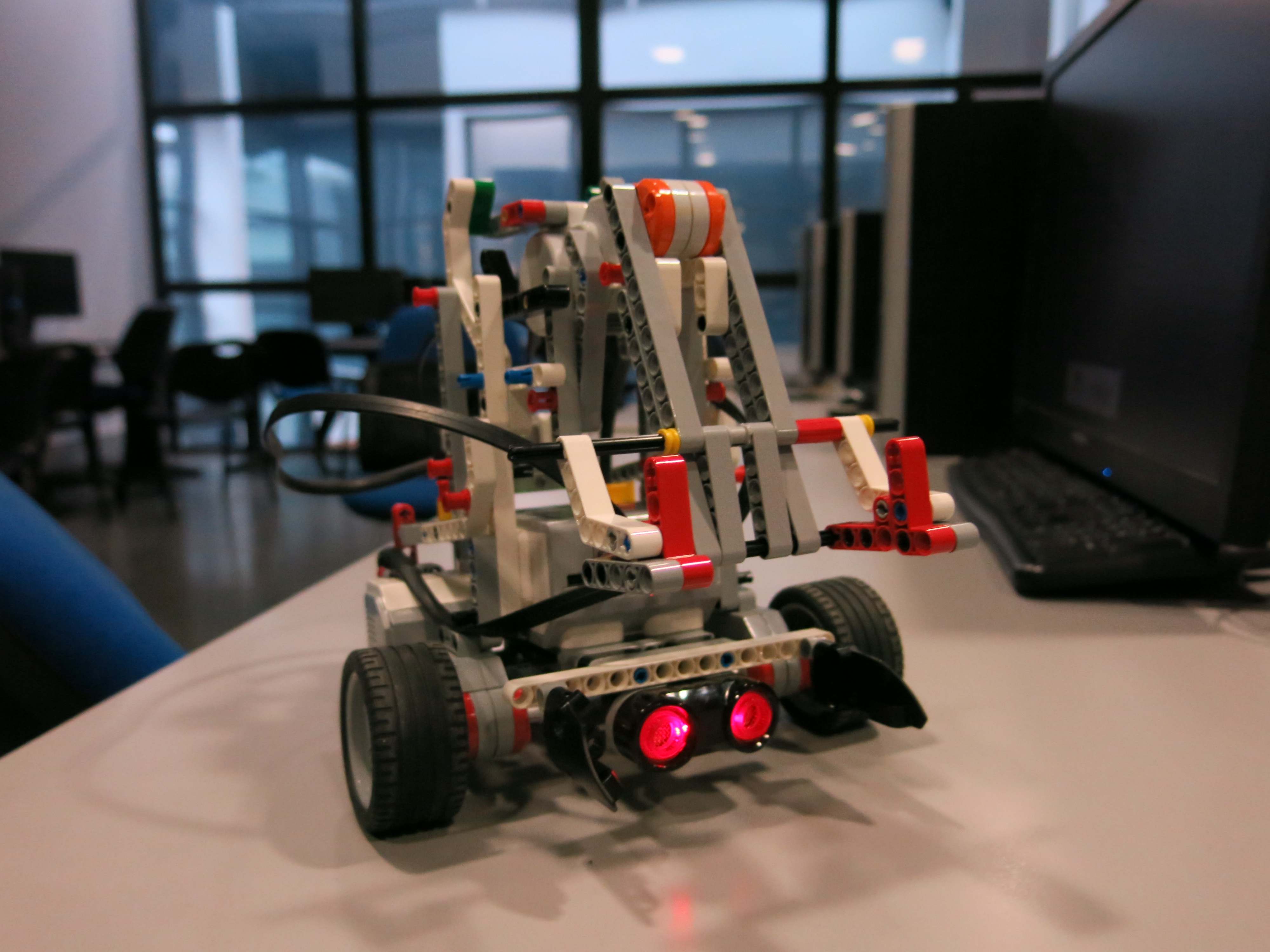
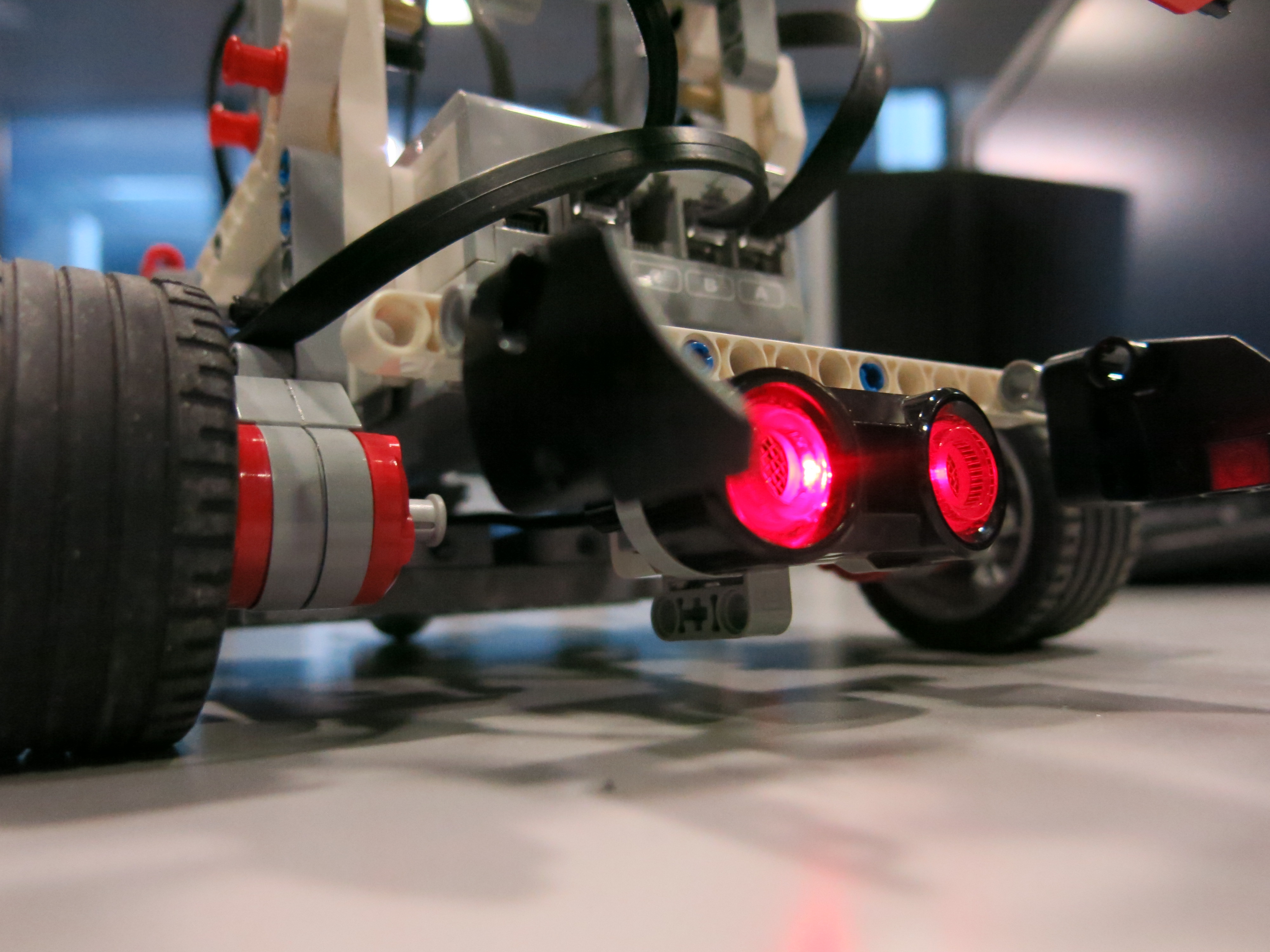
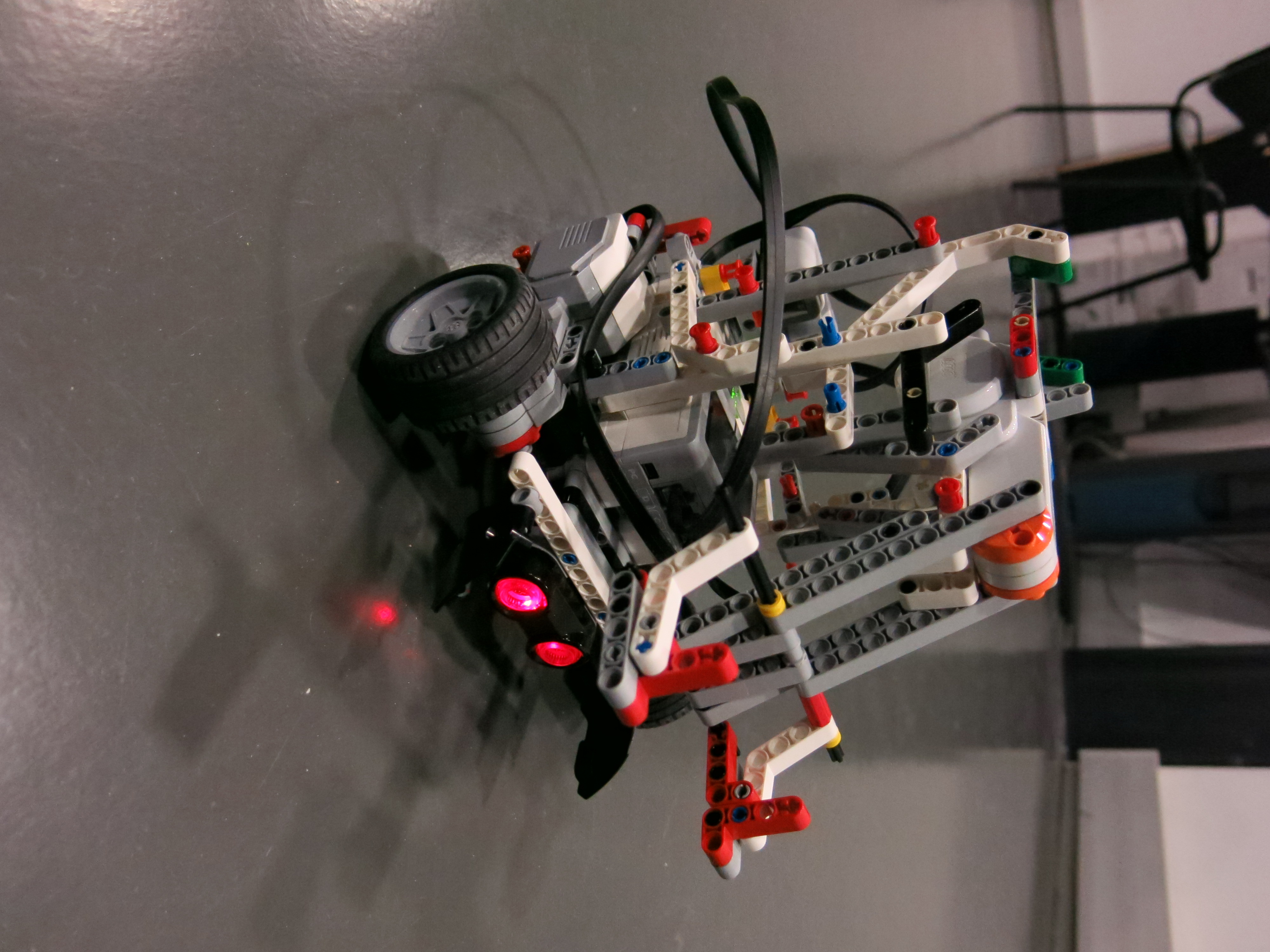
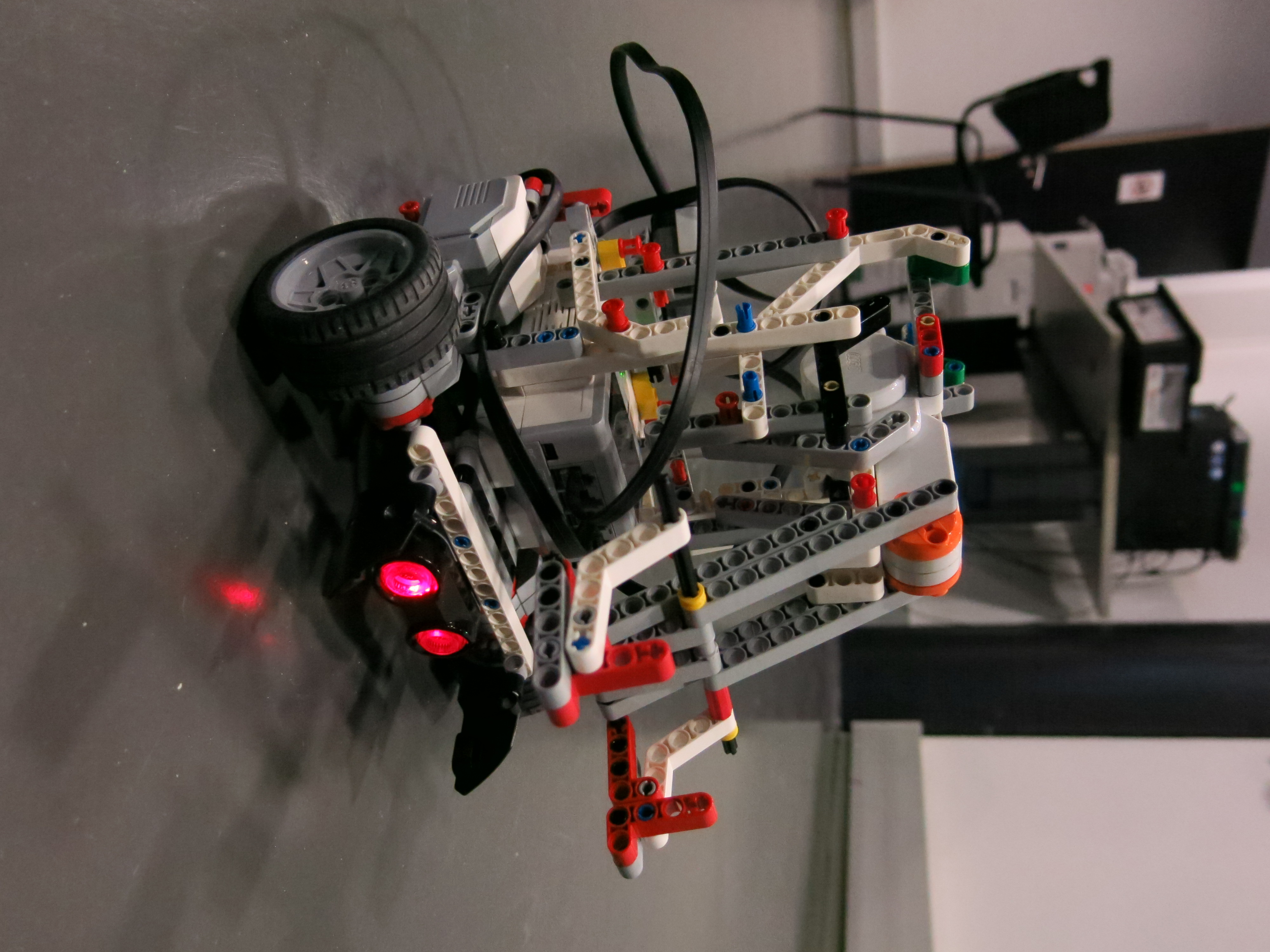
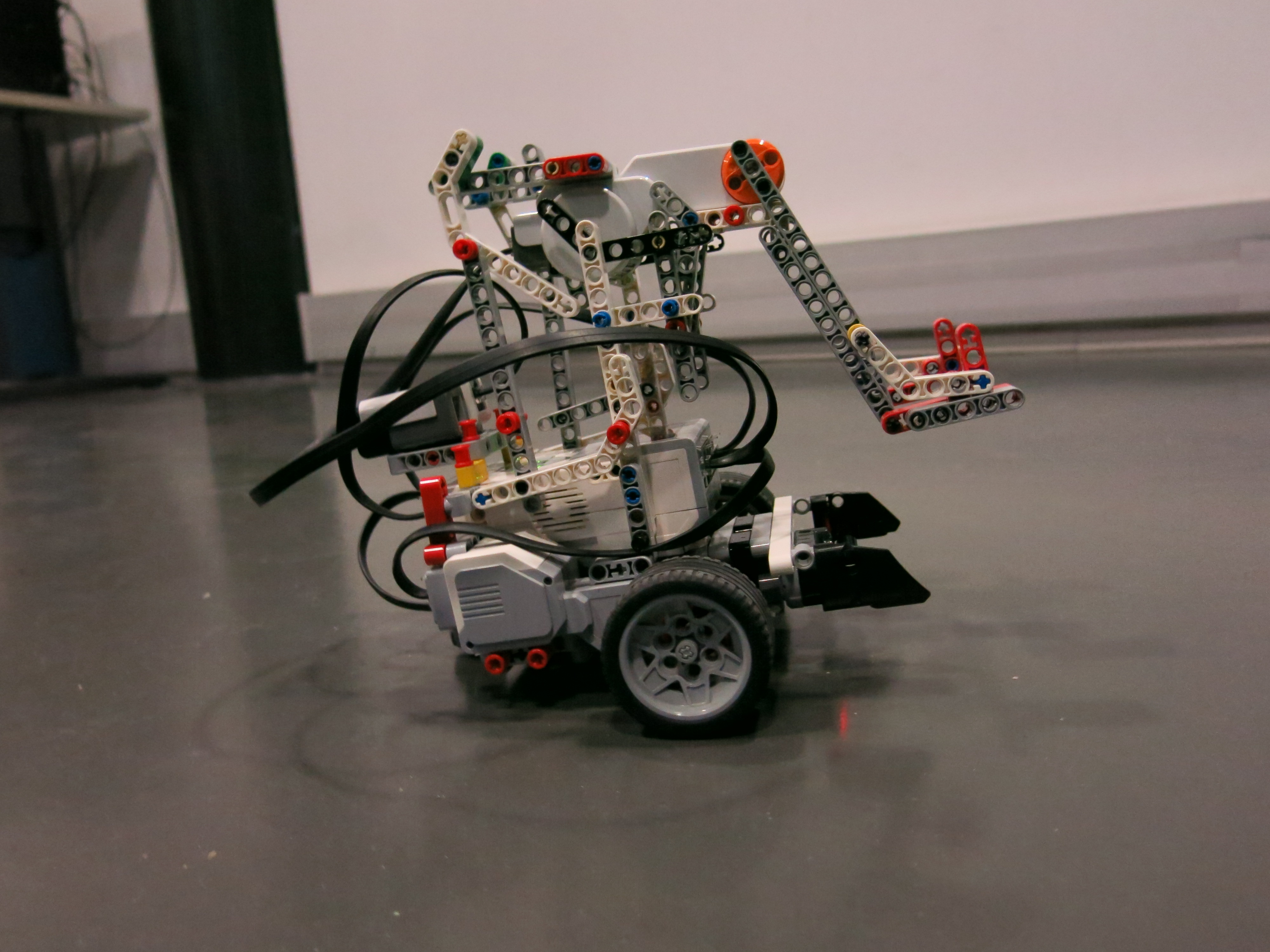
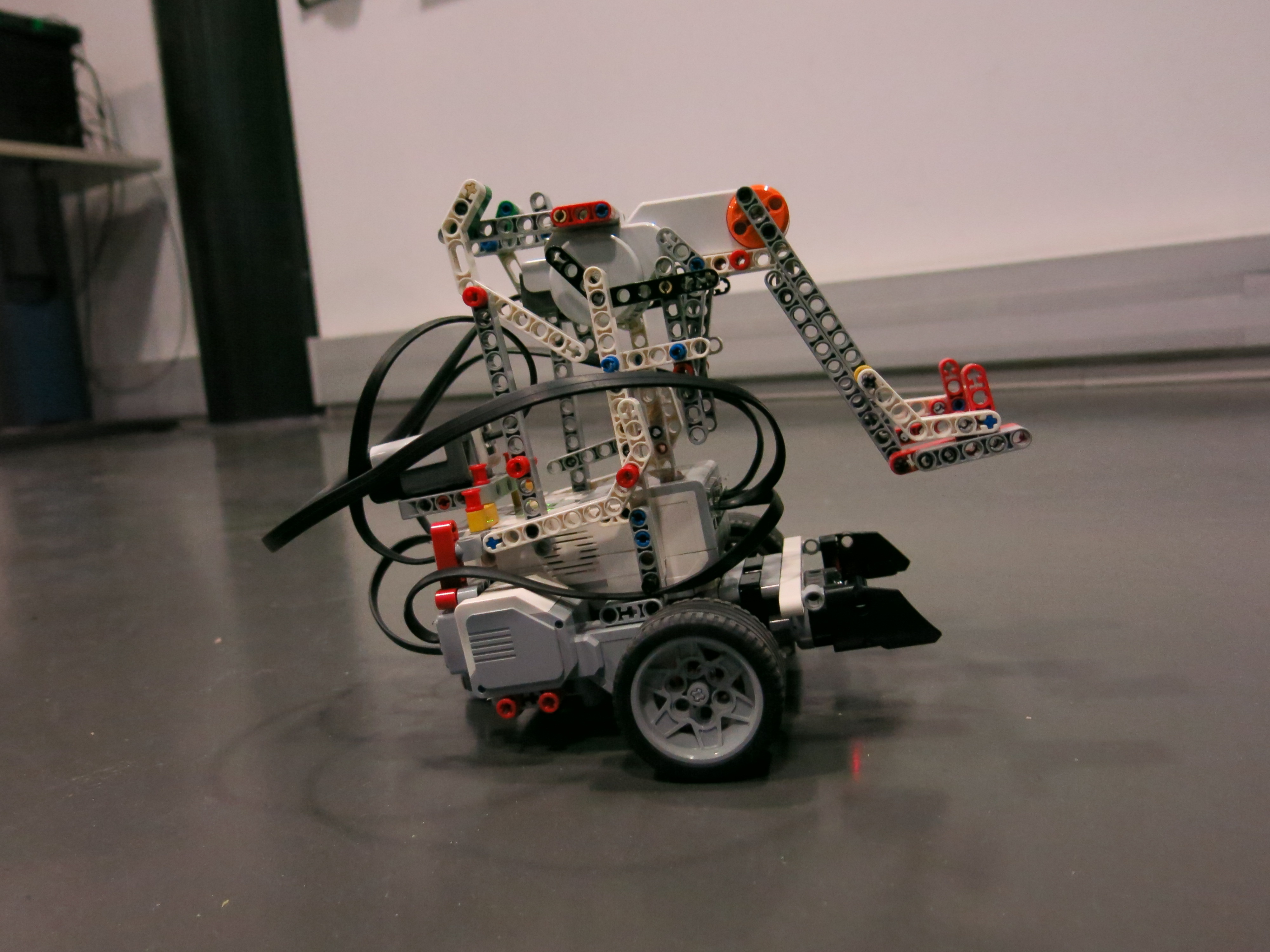
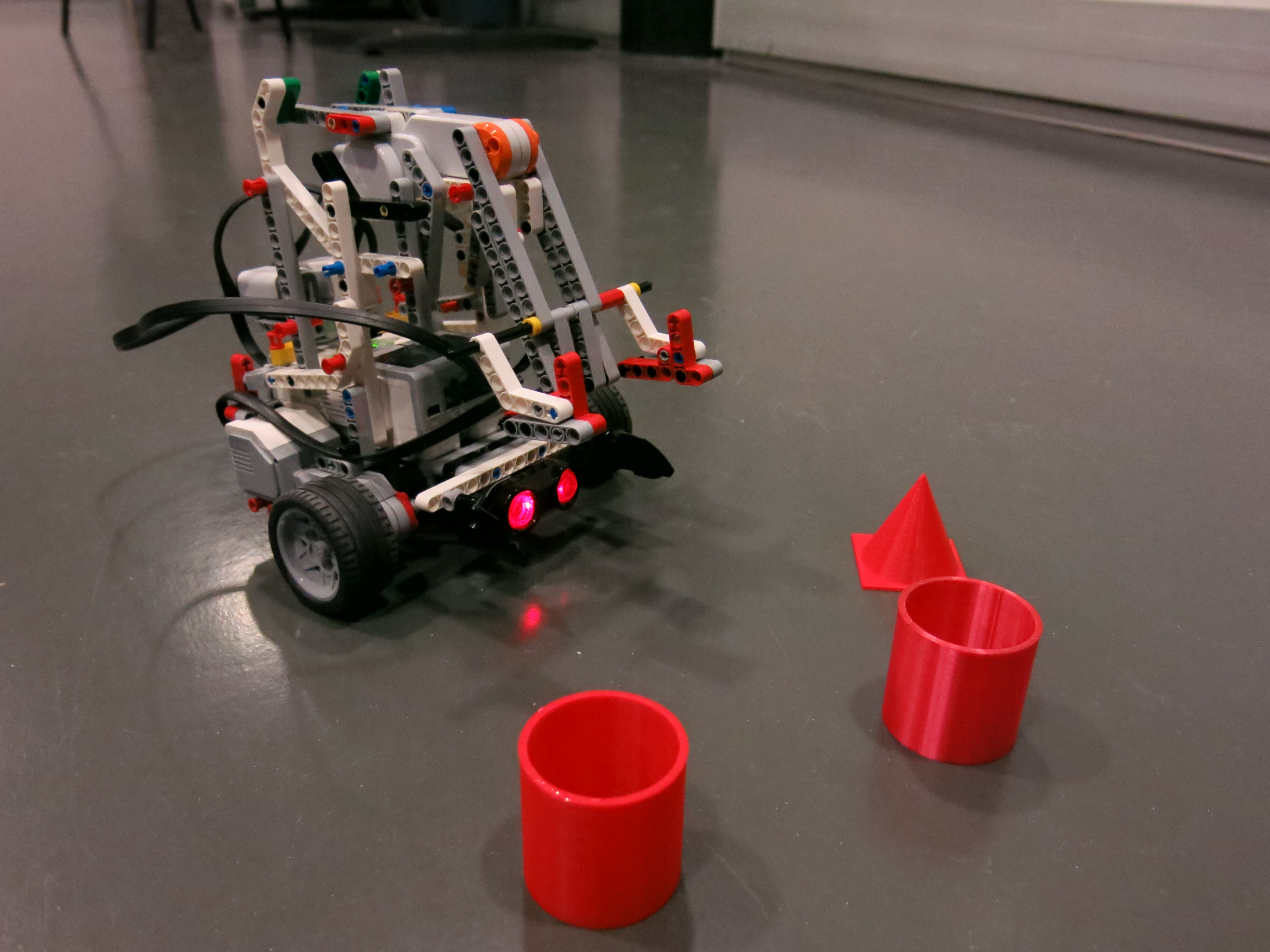
Version 1 - Initial prototype design with gyroscope and sonar
📝 Design
Our first version was designed to understand the fundamentals of EV3 programming, navigation, and object detection. The goal was to pass basic tests and validate our approach to autonomous ore collection. We focused on creating a simple and functional design to learn the capabilities and approach the challenges.
🔧 Hardware Components
📹 Demonstration
Video demonstrations showcasing the robot's capabilities, showing how Version 1 successfully completed the basic ore collection tasks.
Tests #1 & #2 - Basic ore collection
Test #3 - All ore types collection
✅ Tests Passed
- ✓ Test #1: Successfully picked up an ore located directly in front of the robot
- ✓ Test #2: Successfully picked up a selected ore from the starting point
- ✓ Test #3: Successfully picked up all types of ore from the starting position (except cone)
❌ Limitations
- ⬆️ Insufficient lifting height - unable to place objects into elevated containers
- 📏 Limited gripper reach for certain object positions
- 🎯 Structural constraints limiting operational flexibility
🔸 Version 2: Structural Improvements
Improved Design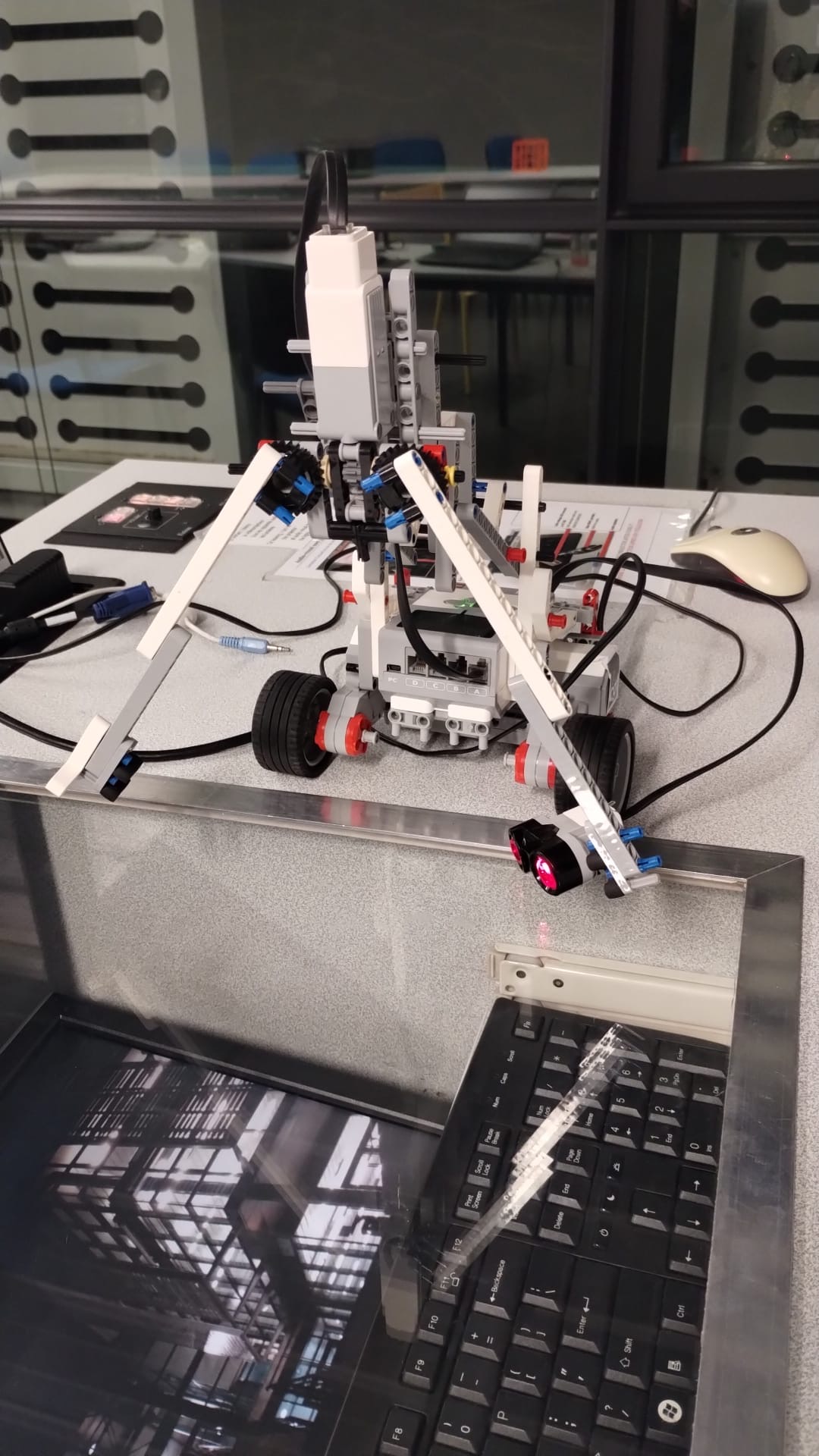
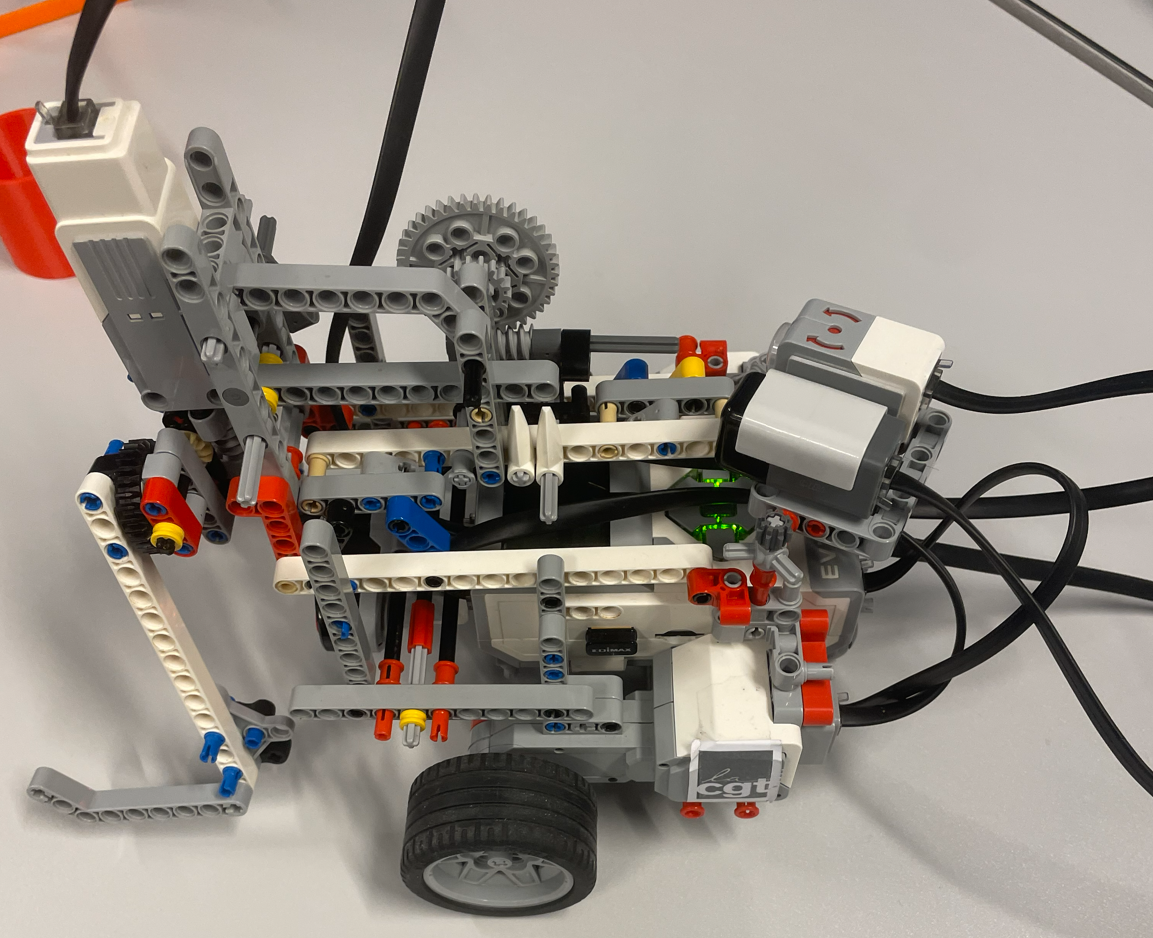
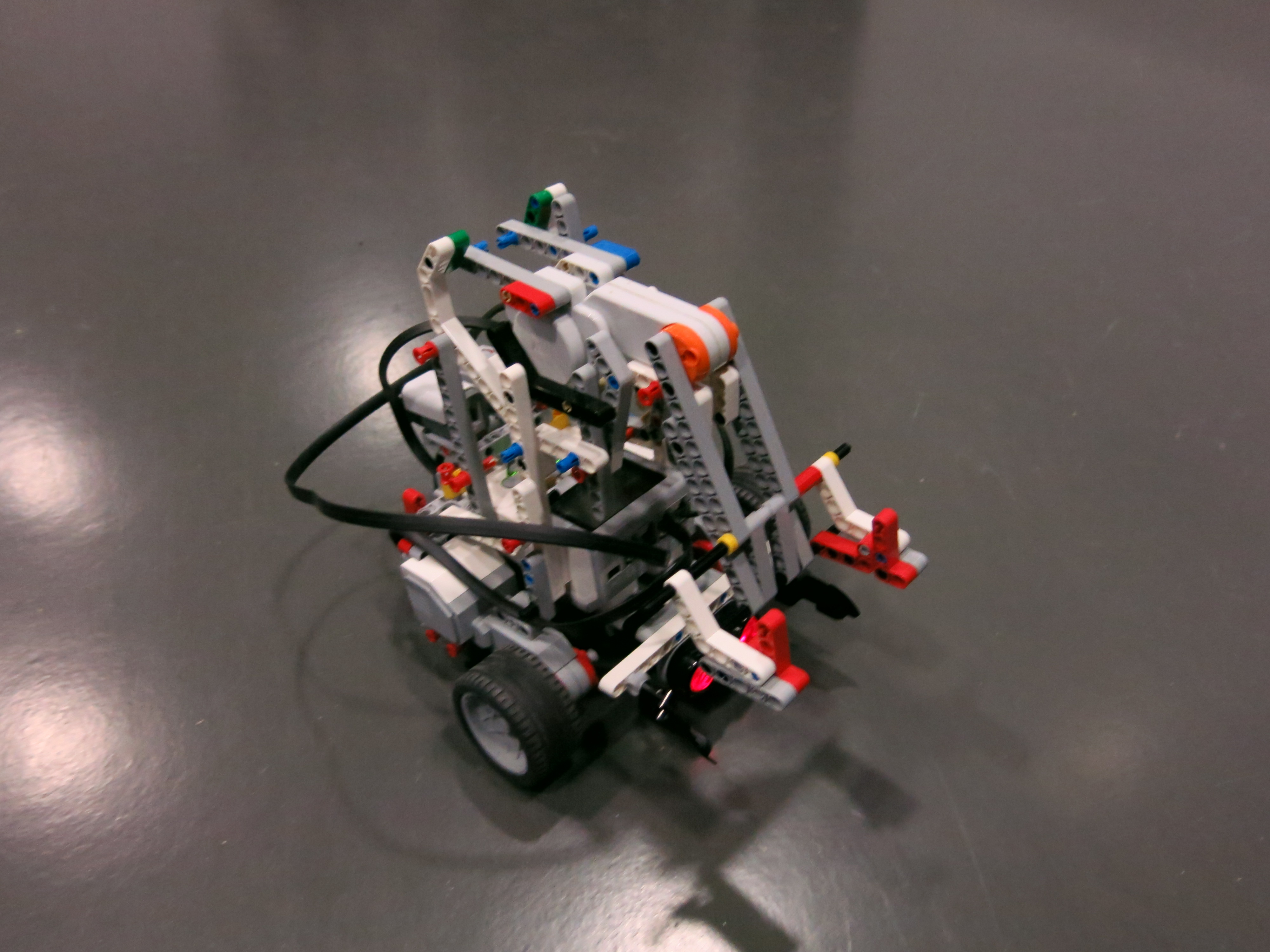
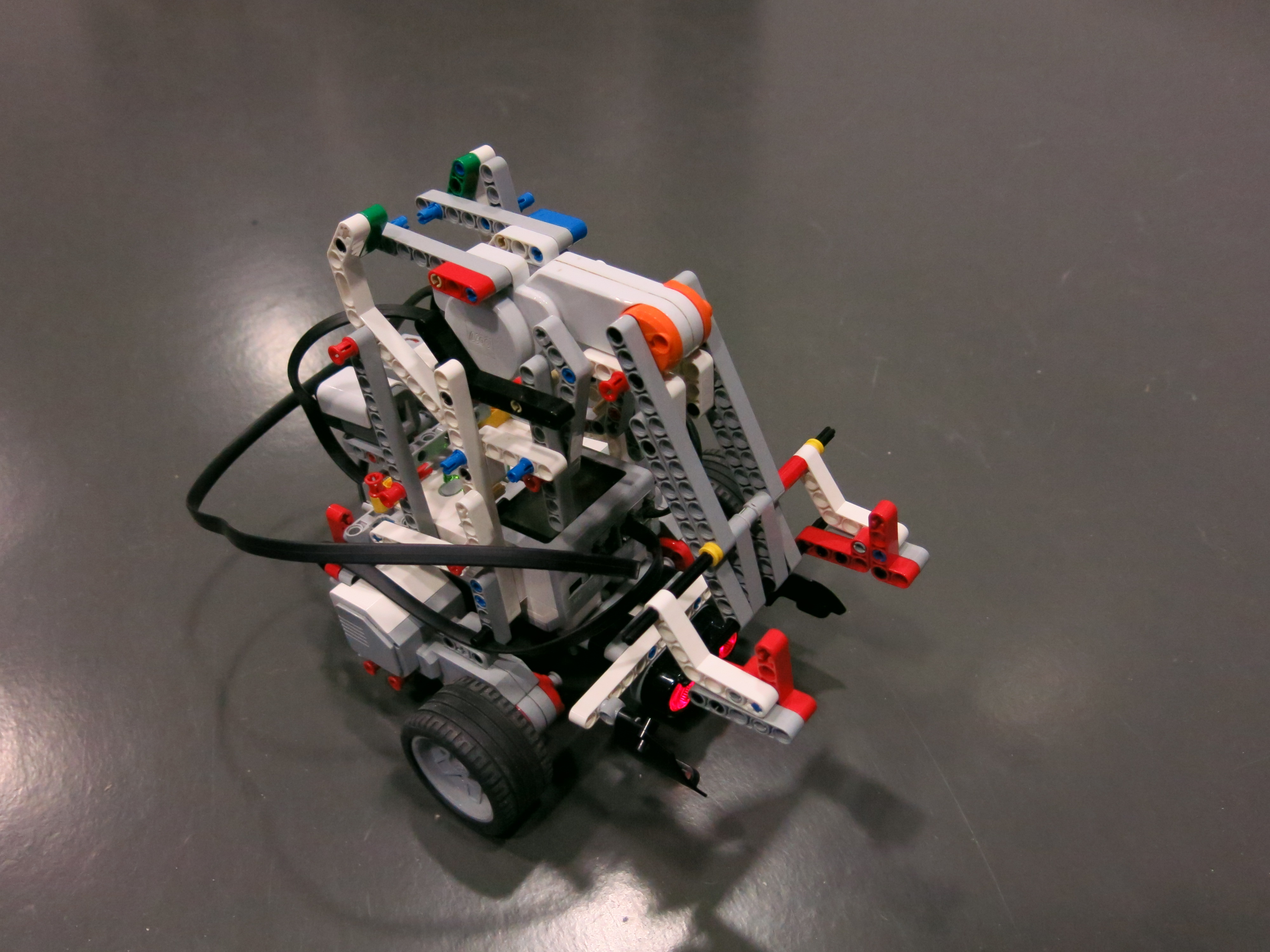
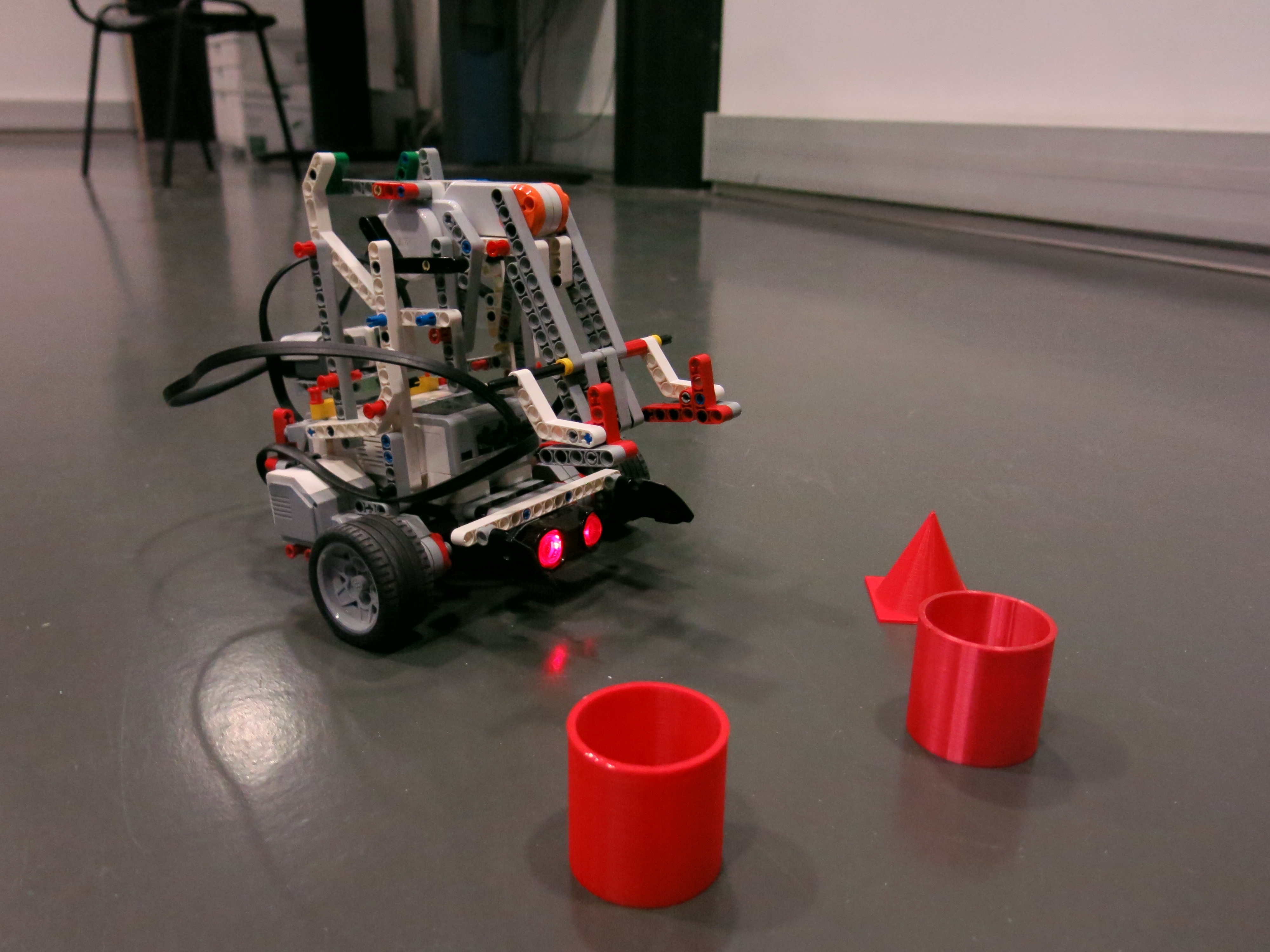
Version 2 - Elevated design with extended gripper reach
📝 Design
Version 2 addressed the critical limitation identified in V1: the inability to lift objects high enough to place them into containers. We implemented significant structural modifications by elevating the entire design and extending the gripper length. These changes enabled the robot to successfully complete tasks requiring elevated object placement while maintaining the proven sensor and motor configuration from V1.
🔧 Hardware Components
🏗️ Structural Modifications
Key Design Changes
- Elevated Base: Raised the robot's overall height to increase lifting range
- Extended Gripper: Increased gripper arm length for better reach and higher object placement
- Improved Stability: Reinforced structure to handle the increased height while maintaining balance
- Same Sensors & Motors: Retained proven components from V1 to focus on mechanical improvements
🔶 Version 3: Box lifter
Box Over Brain💡 Thinking Outside the Box
As engineers, we're taught to think outside the box. But why stop there? Why not pick up the box itself? 🤔
After watching our robot struggle to lift heavy ores into elevated cages for two versions, we had an epiphany: What if... we just put the cage OVER the ore instead? 🎯
Why work harder when you can work smarter? Instead of playing the world's tiniest weightlifter, our robot now operates like a mini forklift, gracefully lowering the cage over the objects.
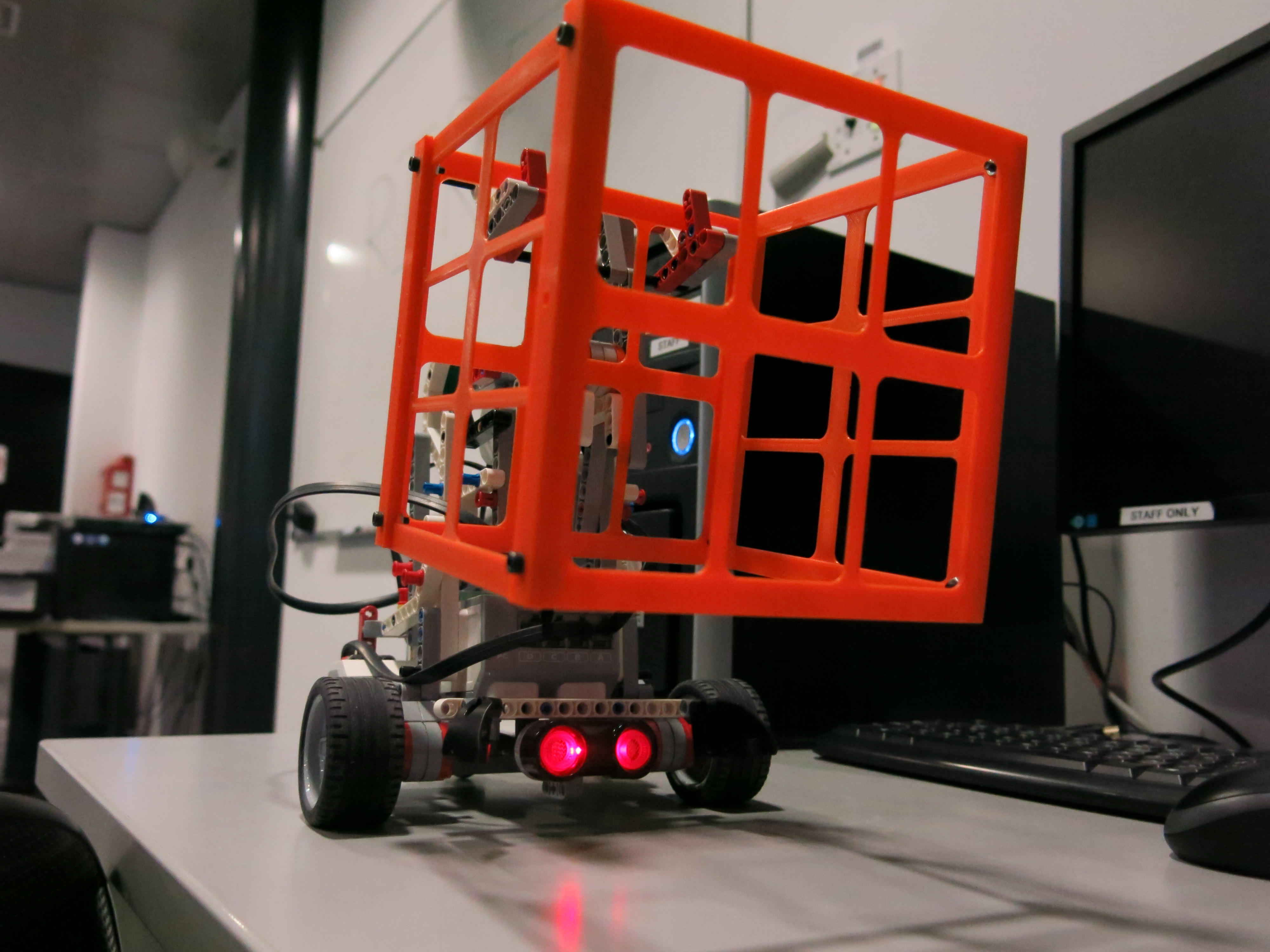


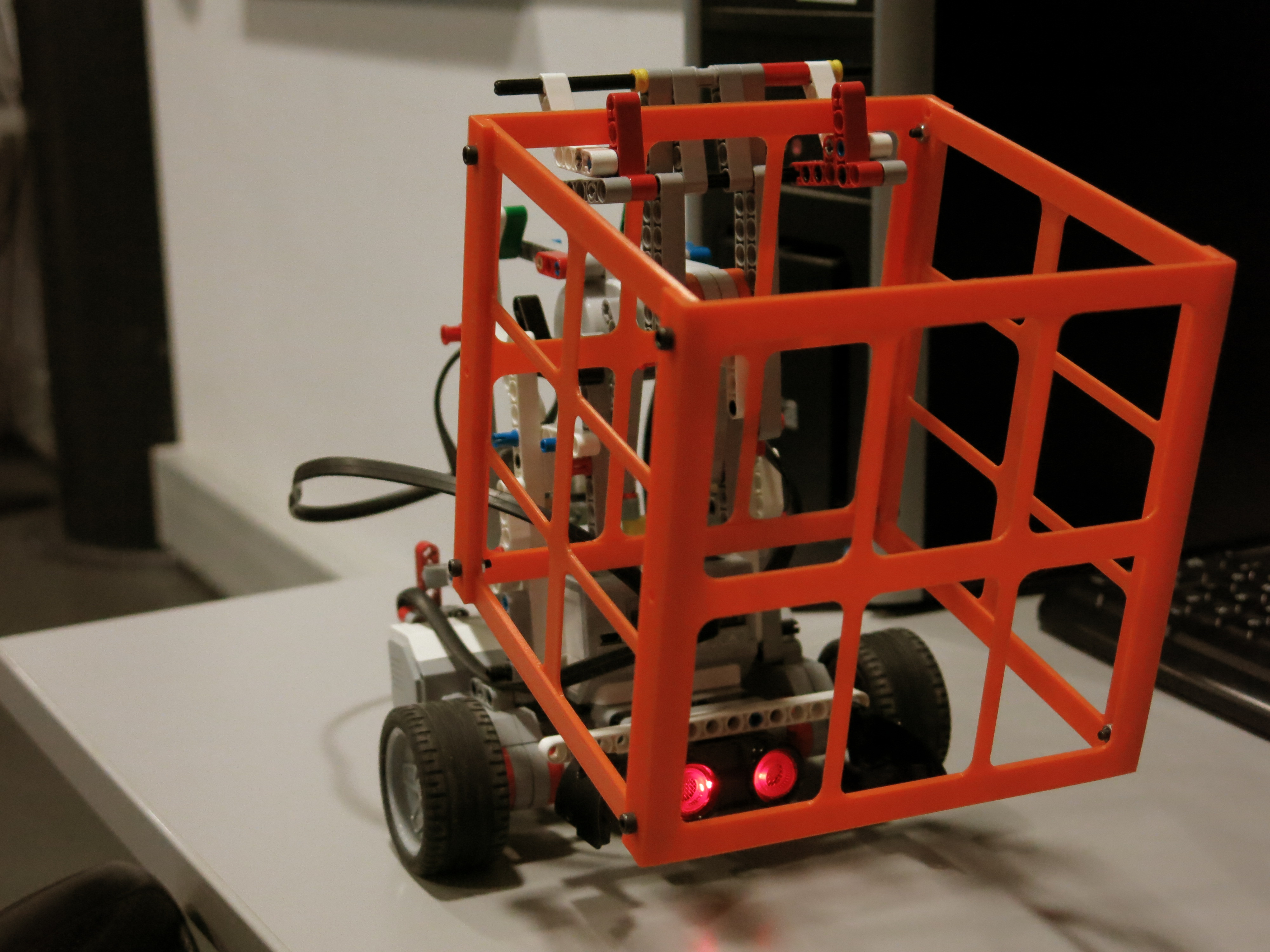
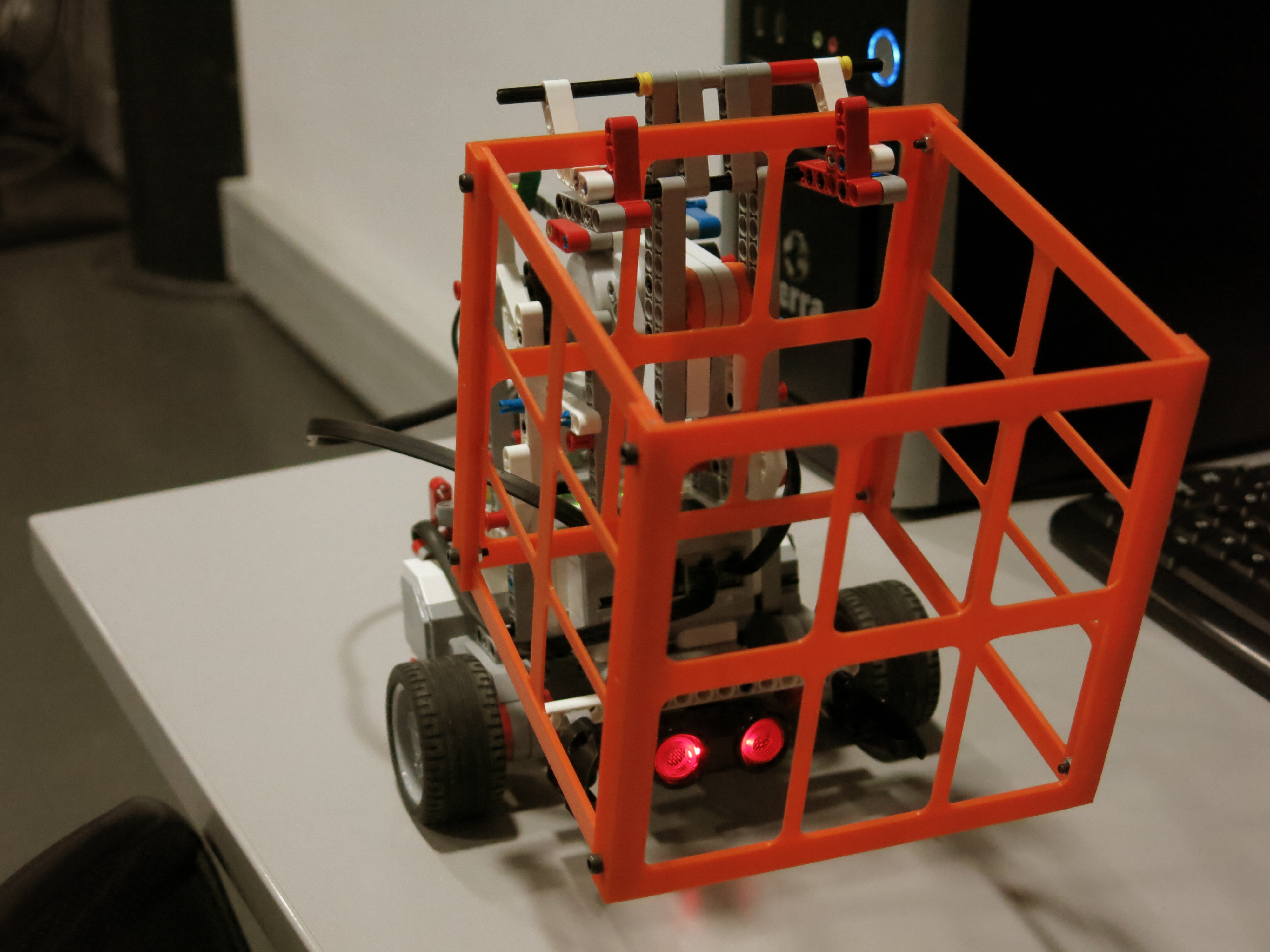
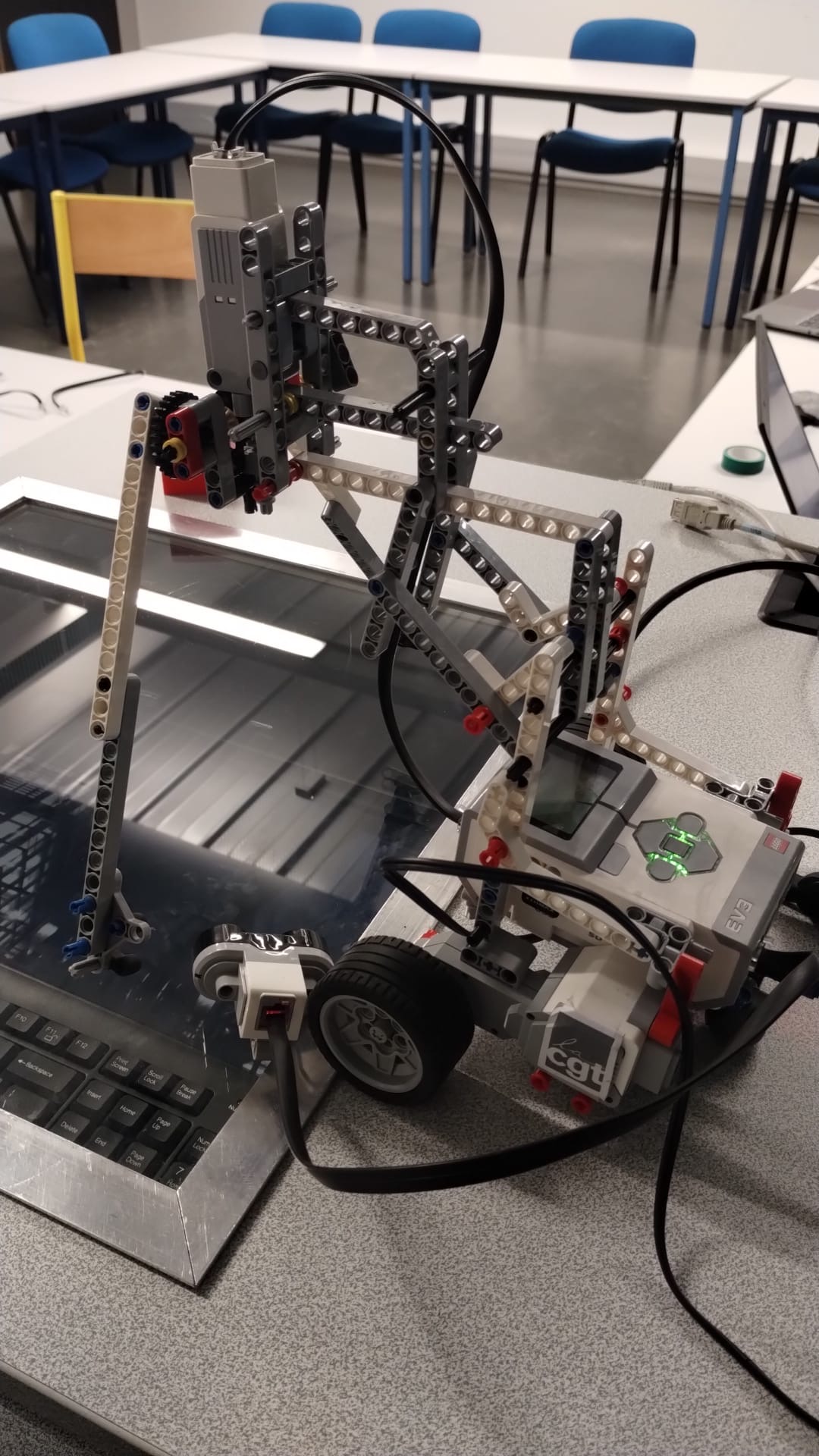
Version 3 - The Forklift Champion (hover over images to enlarge)
📝 Design Philosophy
Version 3 represents a complete reimagining of our approach. Instead of trying to lift objects higher and higher, we flipped the problem on its head literally. By implementing a forklift-style mechanism, we can now lower the cage over the ore, completely eliminating the height limitation that plagued our previous designs. Sometimes the best solution is the one that changes the question!
🔧 Hardware Components
🏗️ Revolutionary Design Changes
The Forklift Innovation
- Inverted Logic: Instead of lifting ore UP into a cage, we bring the cage DOWN over the ore
- Forklift Mechanism: Motor-driven vertical lift system that raises and lowers the cage like a forklift
- Same Sensors, Smarter Strategy: Retained all sensors from V1/V2, but completely redesigned the mechanical approach
- No Height Limits: Since we're lowering instead of lifting, we're no longer fighting gravity with heavy objects
- Simplified Operation: Easier to position cage over ore than to precisely grip and lift
- Better Stability: Cage stays at robot's center of mass during operation
📹 Demonstration
Video demonstration showcasing Version 3's revolutionary forklift-style mechanism in action.
Version 3 Test - Cage lowering mechanism over cone